
算法 - 线性回归与多项式回归
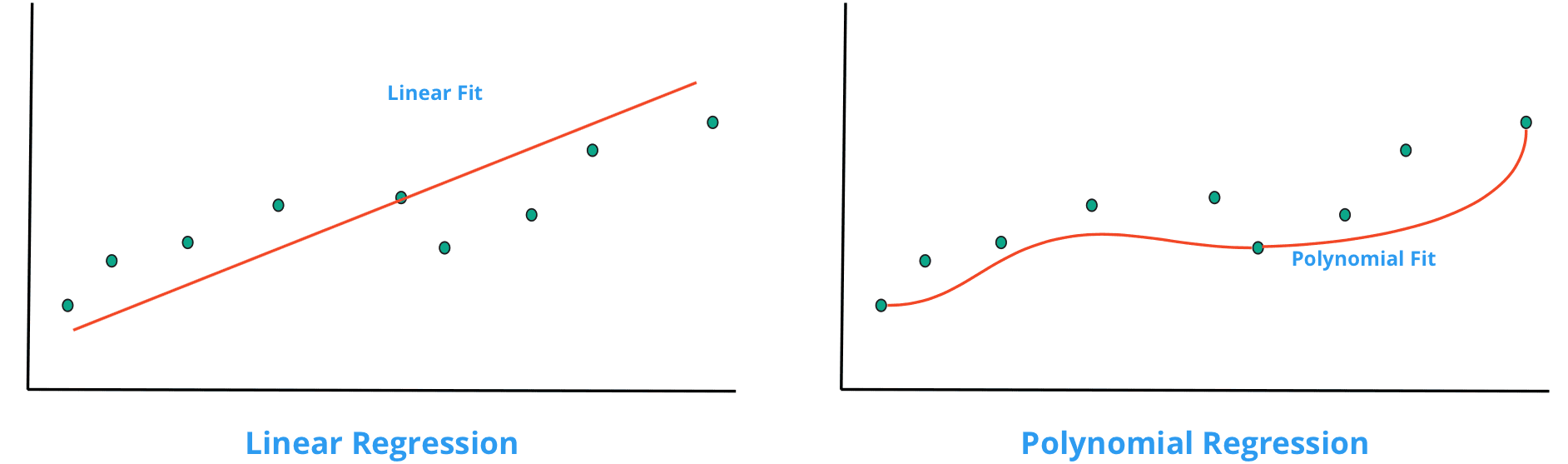
线性回归是多项式回归的特殊情况,当多项式的阶数为1时,它就变成了线性回归。多项式回归通过扩展高次项来描述更复杂的非线性关系,但从数学上讲,它仍然是“线性”的,因为回归...
线性回归是多项式回归的特殊情况,当多项式的阶数为1时,它就变成了线性回归。多项式回归通过扩展高次项来描述更复杂的非线性关系,但从数学上讲,它仍然是“线性”的,因为回归...
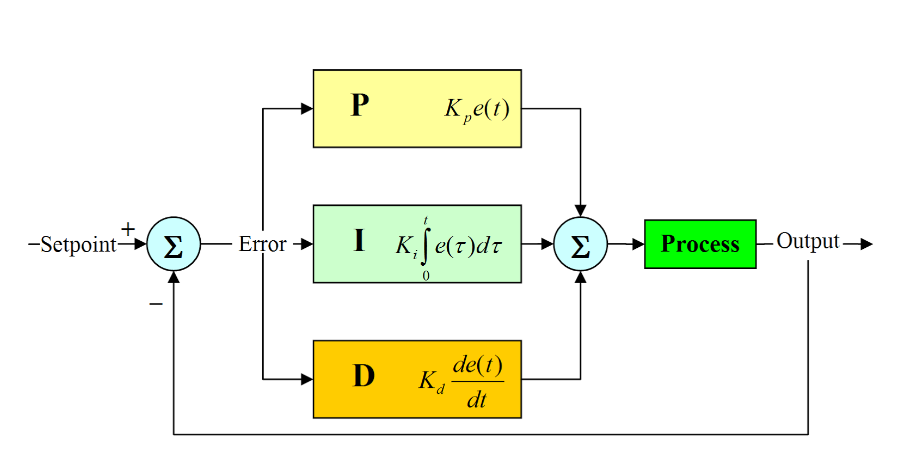
比例-积分-微分控制(PID)是最常用的反馈控制算法之一,它被广泛应用于自动化控制系统中,尤其是在调节系统的输出(如温度、压力、速度等)时。PID 控制算法的核心思想是通过计算系统误差并对误差进行加权处理来计算控制量,从而使系统的输出尽可能接近设定值。
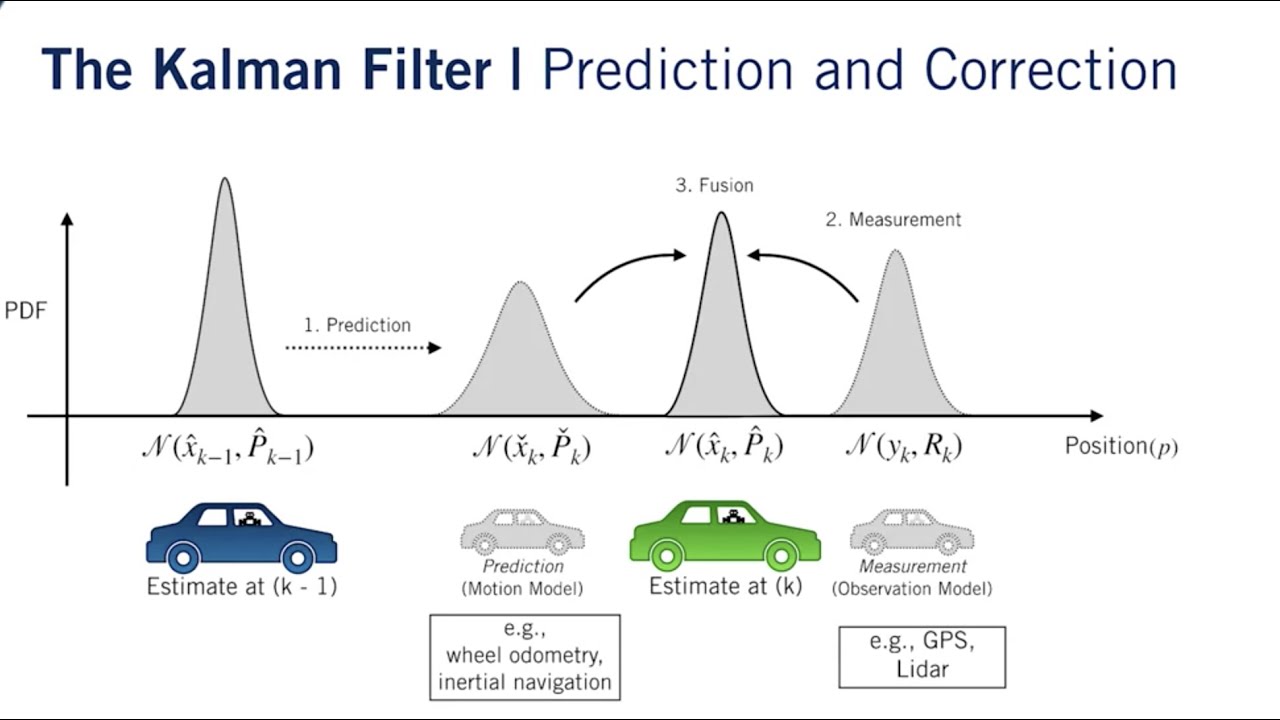
卡尔曼滤波(Kalman Filter)是一种广泛应用于动态系统估计的数学算法。它能够基于系统的数学模型和实时测量数据,通过递归的方式不断优化系统状态的估计。卡尔曼滤波在处理带有噪声的动态系统时非常有效,特别适用于那些有滞后或变化不确定性的系统。
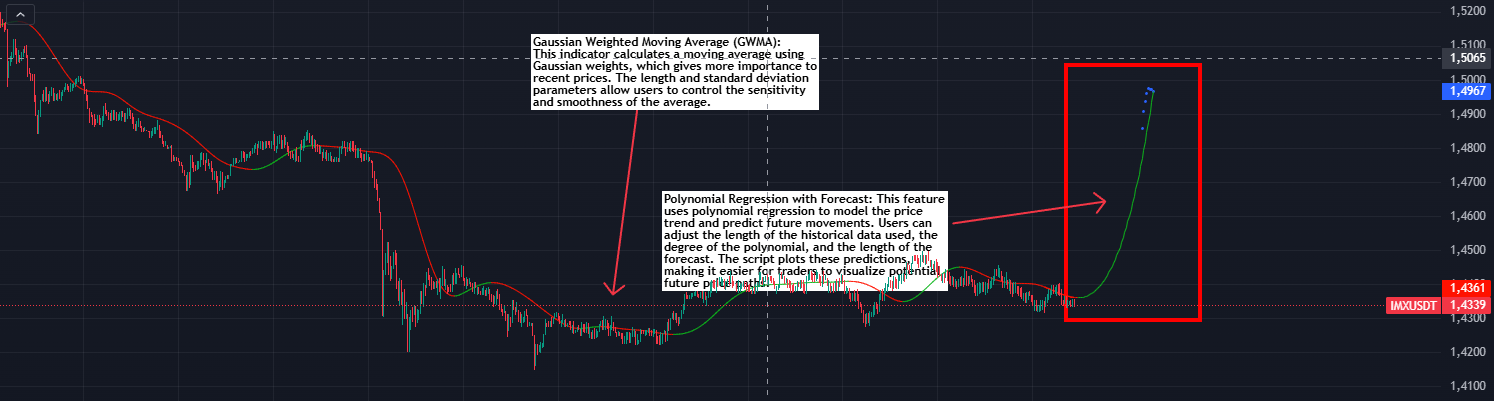
GWMA 最常用于时间序列的数据分析和信号处理,结合高斯权重和移动平均的特点,可以对数据进行平滑处理,同时保持较高的响应能力。